Matrix for rotation is an anticlockwise direction.
Design a matrix of rotation about anticlockwise.
Below is the output of our code.
Matrix for rotation is a clockwise direction.
The most general three dimensional rotation matrix represents a counterclockwise rotation by an angle θ about a fixed axis that lies along the unit vector ˆn.
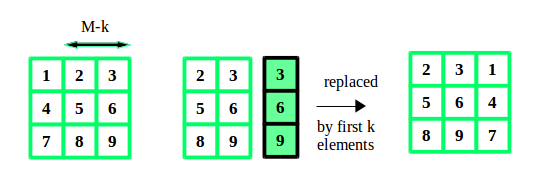
Rotate the matrix right by k times.
Input 1 2 3 4 5 6 7 8 9 output.
From the top to the right then down and then to the left and back up to the top.
Minimum difference between adjacent elements of array which contain elements from each row of a matrix.
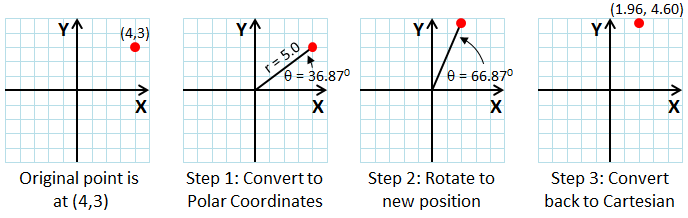
Rotate matrix by 45 degrees.
5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80.
Real orthogonal n n matrix with detr 1 is called a special orthogonal matrix and provides a matrix representation of a n dimensional proper rotation1 i e.
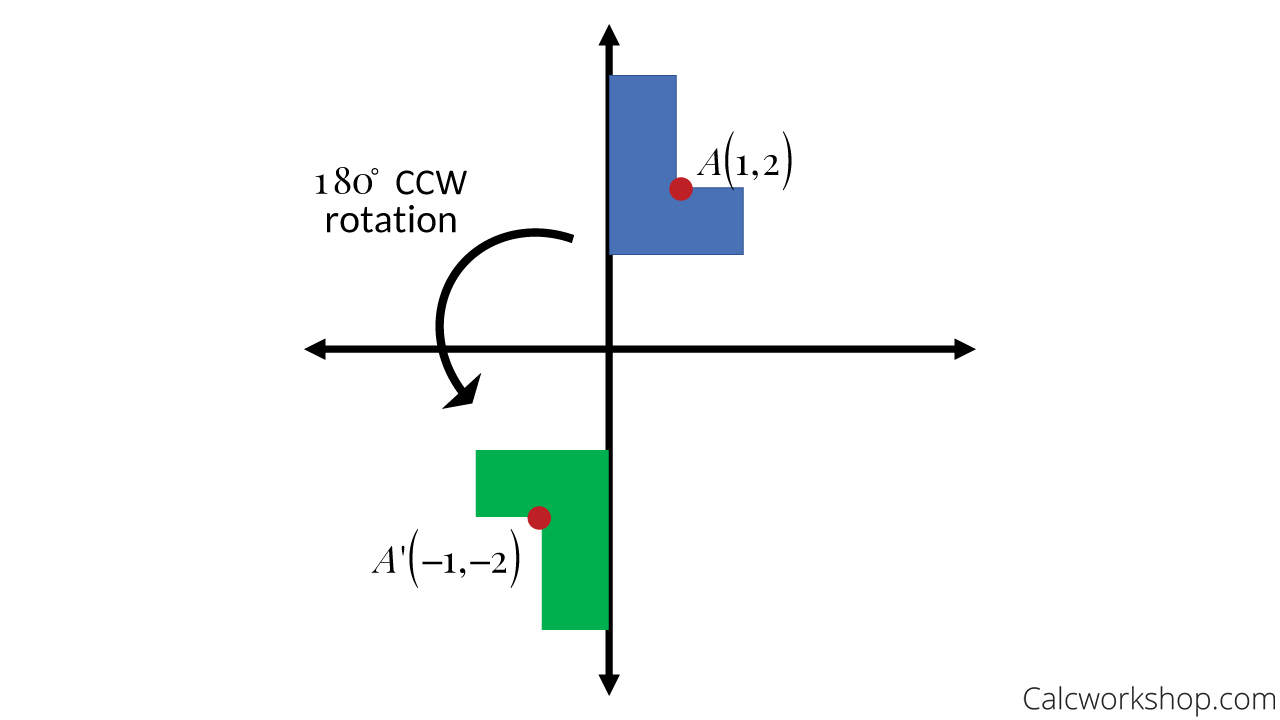
Rotate a matrix by 180 degree.
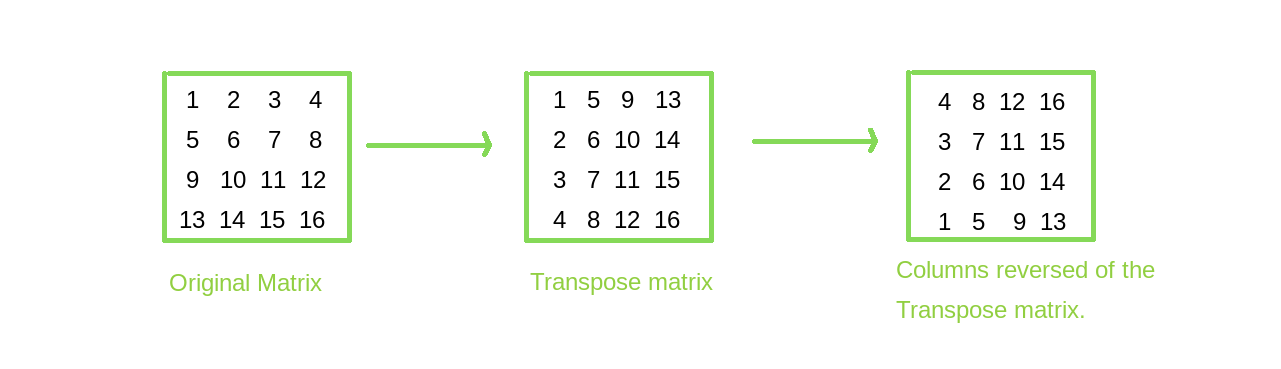
Rotate a matrix by 90 degree in clockwise direction without using any extra space.
Matrix for homogeneous co ordinate rotation clockwise matrix for homogeneous co ordinate rotation anticlockwise rotation about an arbitrary point.
Enter size of matrix nxn.
4 1 2 7 5 3 8 9 6 for 4 4 matrix input.
Rot90 will be used which is a built in function.
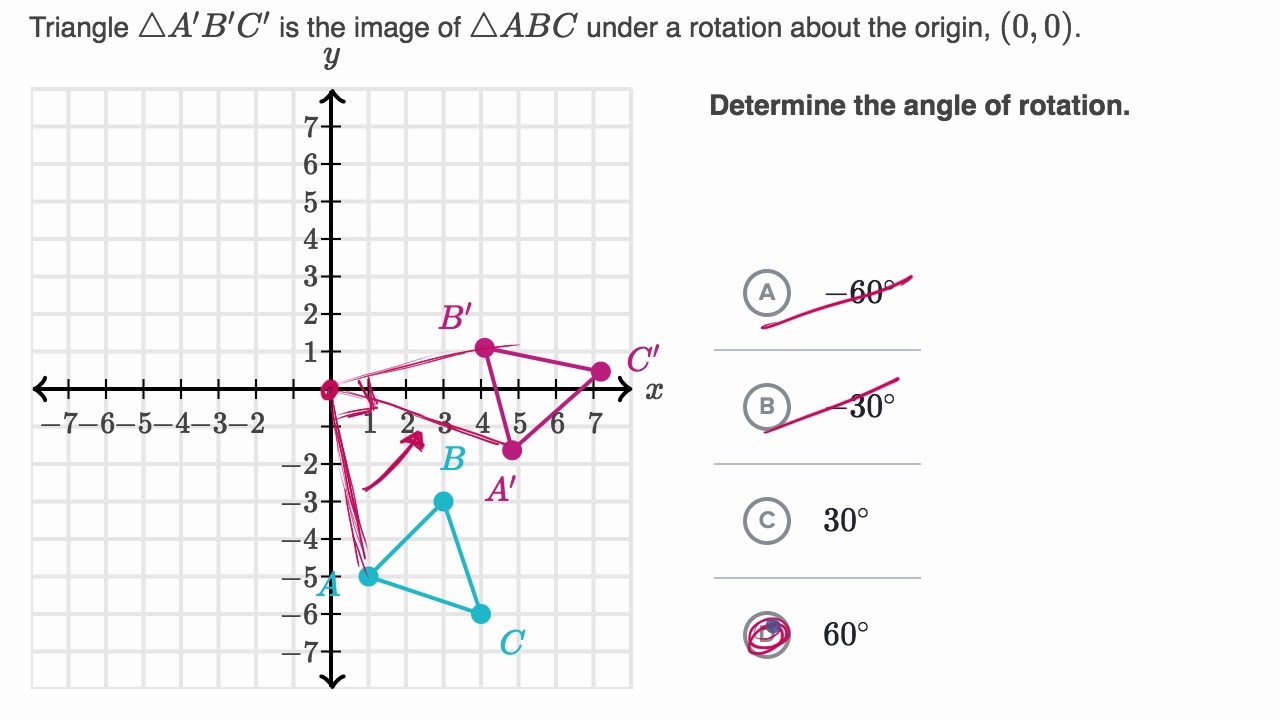
Two dimensional rotation can occur in two possible directions.
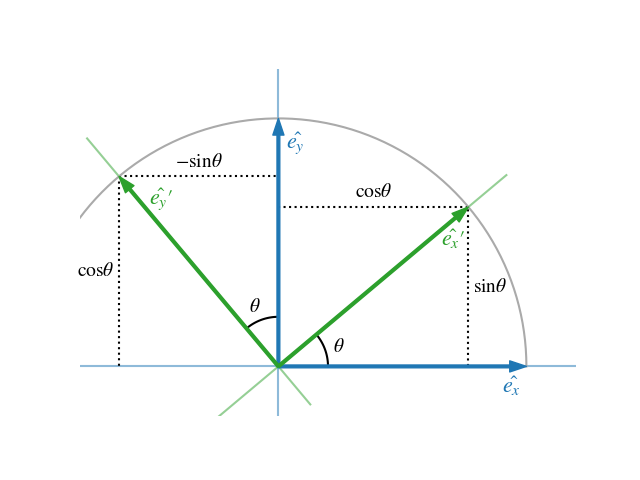
Let s see if we can create a linear transformation that is a rotation transformation through some angle theta.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15.
Given a matrix clockwise rotate elements in it.
Rotates the matrix in clockwise and counterclockwise as per requirement.
Create matrix whose sum of diagonals in each sub matrix is even.
And what it does is it takes any vector in r2 and it maps it to a rotated version of that vector.
The opposite sense of rotation or revolution is in commonwealth english anticlockwise acw or in north american english counterclockwise ccw.
Or another way of saying it is that the rotation of some vector x is going to be equal to a counterclockwise data degree rotation of x.
65 45 25 5 70 50 30 10 75 55 35 15 80 60 40 20 explanation for anticlockwise rotation.
In linear algebra a rotation matrix is a matrix that is used to perform a rotation in euclidean space for example using the convention below the matrix rotates points in the xy plane counterclockwise through an angle θ with respect to the x axis about the origin of a two dimensional cartesian coordinate system to perform the rotation on a plane point with standard.
Matrix after rotating 90 degree clockwise.
If we want to rotate an object or point about an arbitrary point first of all we translate the.
Clockwise counterclockwise rotation of a matrix using numpy library.
A given n x n matrix will have n 2 square cycles.
Clockwise counterclockwise rotation of matrix using numpy library.